missiondebug
Open sourceRobotics observability · ROS 2 · Local-first
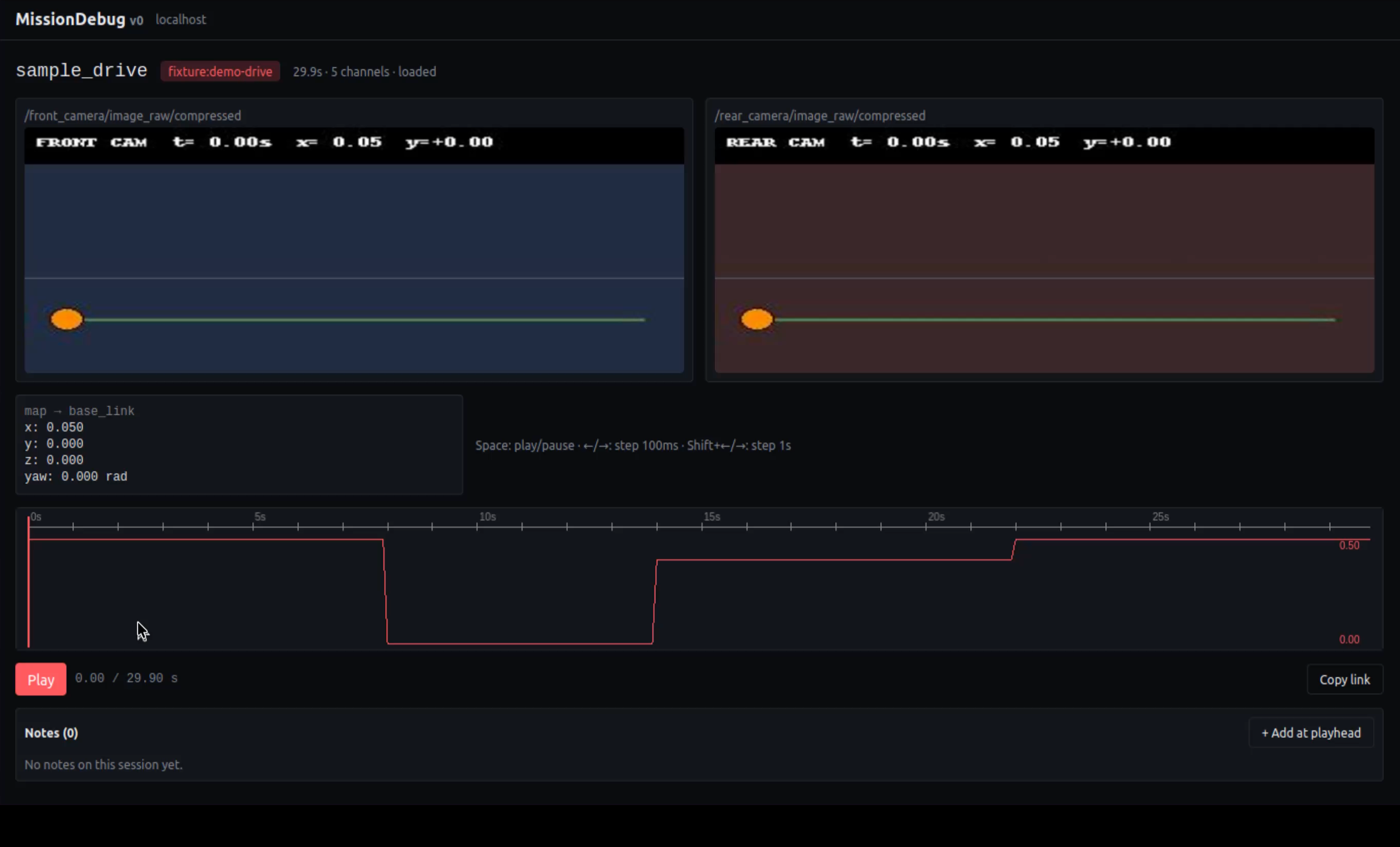
Local-first debugger for ROS 2 robots — record, detect, replay.
The product version of the thesis in field note 03. missiondebug captures ROS 2 topics into MCAP, runs configurable rule-based anomaly detectors against the stream, and lets you replay the moment a robot misbehaved — all locally on the operator's machine, no cloud round-trip, no customer data leaving the plant. Built for robotics teams who want observability without being told what an anomaly is by an opaque ML model.